Автономные подводные роботы: использование систем, виды, преимущества и недостатки
Подводные роботы уже стали обычным инструментом для инженеров, научных групп и бизнеса. Под этим термином понимают специализированные механизмы и системы, которые работают в толще воды и выполняют наблюдение, измерения, инспекции, ремонт, поиск объектов там, где человеку находиться опасно, дорого или практически невозможно.

Подводные роботы: от научных исследований до промышленного применения
Определение и назначение
Подводные роботы уже стали обычным инструментом для инженеров, научных групп и бизнеса. Под этим термином понимают специализированные механизмы и системы, которые работают в толще воды и выполняют наблюдение, измерения, инспекции, ремонт, поиск объектов там, где человеку находиться опасно, дорого или практически невозможно.
Смысл прост: подводный аппарат берет на себя рутинную и рискованную работу, а люди остаются на борту судна, на берегу или в центре управления. Подводные роботы помогают изучать морскую среду, осматривать дно, контролировать состояние инфраструктуры и собирать данные для принятия решений.
Чаще всего подводные роботы входят в комплексные системы подводные для наблюдения и управления. В них входят судовые комплексы, пульты операторов, линии связи, программное обеспечение и хранилища данных. Пользователь получает не отдельную машину, а решение под конкретные задачи в разных сферах — от науки до промышленности.
Чем подводные роботы отличаются от обычных роботов?
По устройству подводные роботы похожи на другие роботы: корпус, источник энергии, системы управления, датчики, исполнительные механизмы. Отличия задает среда.
Основные особенности:
- Корпус. На глубине резко растет давление, поэтому корпус подводного робота и каждый узел должны выдерживать большие нагрузки.
- Герметичность. Морская вода проводит ток и ускоряет коррозию, любая утечка приводит к отказу оборудования.
- Навигация. GPS под водой не работает, радиосигнал затухает, поэтому системы позиционирования строят на других принципах.
- Связь. Каналы связи ограничены: обычно это кабель или акустические модемы с небольшой дальностью и скоростью.
- Энергия. Заряда батарей хватает не так надолго, подзарядки на глубине нет, поэтому подводный аппарат должен расходовать энергию очень экономно.
Поэтому подводные роботы — это отдельное направление подводной робототехники со своими стандартами и технологиями. Оно развивается параллельно наземной и воздушной робототехнике, но решает свои задачи.
Основные типы подводных роботов
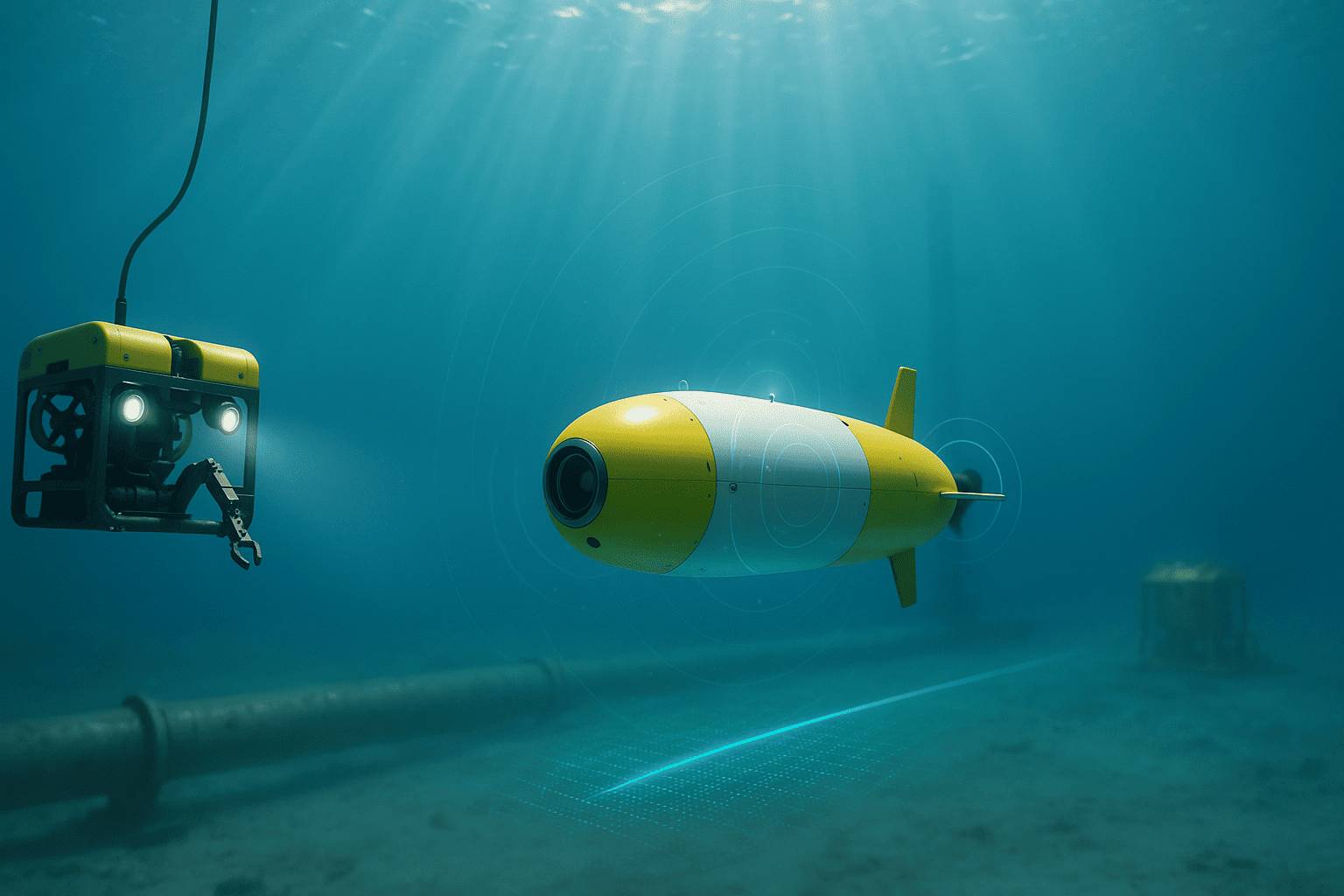
Под термином «подводные роботы» скрываются разные классы техники. На практике выделяют три группы: автономные подводные аппараты, телеуправляемые комплексы и гибридные решения.
Автономные подводные аппараты (AUV)
Автономные подводные аппараты (AUV) — это подводные роботы, которые после запуска работают по программе. Еще на борту задают маршрут, глубину, режимы датчиков и условия завершения миссии.
Такие подводные роботы используются для:
- картографии дна и построения 3D-моделей рельефа,
- экологического мониторинга и оценки состояния окружающей среды,
- поиска аномалий, объектов и утечек в районе трубопроводов и других сооружений.
Здесь особенно нужны автономные подводные решения: они часами идут на глубине без кабеля, обследуют большие участки и возвращаются с массивом измерений. Современные AUV — это сложные системы с точными датчиками, развитой навигацией, экономичными двигателями и софтом для анализа данных.
Телеуправляемые подводные аппараты (ROV)
Телеуправляемый подводный аппарат (ROV) — это подводный аппарат, соединенный с судном кабелем-тросом. Оператор управляет им с пульта и в реальном времени видит картинку с камеры и телеметрию.
ROV применяют, когда нужно:
- провести детальную инспекцию или ремонт конструкций,
- выполнить точные манипуляции — перекрыть арматуру, снять образцы, установить датчики,
- сопровождать погружение и монтаж глубоководных сооружений.
Сильная сторона ROV — точность. Оператор фактически «работает руками» через манипуляторы подводных роботов на глубине. Ограничения — кабель, который сдерживает дальность и маневренность, и требования к квалификации команды.
Гибридные и экспериментальные модели
Между полностью автономными и полностью управляемыми системами появились гибридные подводные роботы. Они могут идти по программе, а при необходимости переходить на управление оператором по кабелю или акустическому каналу.
К этому классу относятся:
- экспериментальные платформы с изменяемой плавучестью,
- бионические подводные роботы, копирующие движения рыб или морских животных,
- модульные подводные аппараты, которые собирают под конкретный проект.
Такое применение подводных решений объединяет преимущества автономности и ручного управления и повышает безопасность работ.
Как работают подводные роботы?
Чтобы оценить возможности подводных роботов, важно понимать, как они ориентируются в воде, какие данные собирают и как отдают их на поверхность.
Системы навигации и управления
Навигация — ключевая задача подводной робототехники. Без устойчивого позиционирования подводные роботы быстро уходят с курса.
Используются:
- инерциальные навигационные системы (гироскопы, акселерометры),
- акустические системы позиционирования (USBL, LBL и др.),
- датчики глубины, течений, скорости хода.
Бортовая программа объединяет данные, корректирует курс и держит аппарат на траектории. Это помогает стабилизировать робота при течениях и волнах.
Для телеуправляемых комплексов важна система удержания позиции: подводный аппарат должен уверенно «стоять» у объекта, несмотря на натяжение кабеля.
Датчики, камеры и сбор данных под водой
Подводные роботы решают задачи измерений и инспекций. На них ставят:
- видеокамеры и фотоаппараты,
- сонары для поиска объектов и картирования дна,
- датчики температуры, солености, мутности воды,
- химические сенсоры для обнаружения утечек газа или нефти.
Современные системы записывают десятки каналов параллельно. Это дает материал для детального использования: от быстрого осмотра до научных публикаций и инженерных расчетов.
Проблемы связи под водой и ограничения по передаче данных
Связь под водой сильно отличается от наземной. Радиосигнал затухает, поэтому подводные роботы не используют привычные беспроводные стандарты.
Основные варианты:
- кабельная связь для ROV,
- акустические модемы для обмена небольшими пакетами с автономными системами,
- всплытие аппарата для передачи больших объемов по радиоканалу или через спутник.
Это ограничивает использование потокового видео и сложных интерфейсов при автономных миссиях. Поэтому часть системы анализа данных выводят на берег: аппарат записывает информацию в память, а расшифровка идет после рейса.
Где применяются подводные роботы?
Направлений, где востребована подводная робототехника, становится больше. Если раньше такие системы были редким научным оборудованием, то сейчас подводные роботы — рабочий инструмент в разных сферах.
Научные исследования (океанография, морская биология, мониторинг среды)
Для ученых подводные роботы — способ добраться до зон, куда человеку не попасть. С их помощью:
- изучают глубинные течения и структуру водных масс,
- наблюдают за поведением морских организмов,
- ведут длительный мониторинг окружающей среды в районах промыслов и промышленных объектов.
Развитие подводной робототехники позволило запускать длительные миссии: подводный аппарат неделями измеряет температуру, состав и прозрачность воды по заданному маршруту. В ряде проектов это единственный вариант безопасного использования техники: отправить робота под лед или в зону штормов проще и дешевле, чем экспедицию водолазов.
Нефтегазовая и энергетическая отрасль (трубопроводы, платформы, инспекции)
В промышленности применение подводных решений особенно заметно в нефтегазе и энергетике. Здесь подводные роботы:
- регулярно осматривают подводные трубопроводы,
- инспектируют опоры платформ и другие конструкции,
- контролируют состояние кабелей и узлов.
Телеуправляемые подводные аппараты берут на себя ремонт и обслуживание на больших глубинах. Автономных подводных роботов используют для обследования маршрутов будущих трубопроводов и контроля после аварий.
Такое применение снижает риски для персонала: роботов отправляют туда, где условия слишком опасны или нестабильны.
Военные и спасательные операции
Военные и спасатели также опираются на достижения подводной робототехники. Подводные роботы используют для:
- поиска и идентификации взрывоопасных предметов,
- обследования подводной части портовой инфраструктуры и судов,
- поиска затонувших объектов и техники,
- уточнения обстановки перед спуском водолазов.
В мутной воде и на больших глубинах такая техника часто безопаснее классических методов.
Археология и поиск затонувших объектов
Подводная археология — еще одна область, где подводные роботы сильно упростили работу. Вместо серии рискованных погружений археологи используют подводный аппарат, который:
- четко проходит маршрут над объектом,
- делает детальную фото- и видеосъемку,
- помогает строить 3D-модели затонувших судов и сооружений.
Подход позволяет бережно работать с хрупкими артефактами и меньше вмешиваться в окружающую среду.
Примеры подводных аппаратов и решений
Рынок подводной робототехники включает и тяжелые промышленные комплексы, и компактные учебные платформы. Важно понимать не только модели, но и различия в использовании типов решений.
Промышленные системы (пример AUV и ROV)
Крупные промышленные AUV и ROV — это подводные аппараты с мощными двигателями, развитой системой датчиков и высокой готовностью к работе в суровых условиях. Обычно такие подводные роботы входят в состав комплексов, которые включают:
- пульт управления и наземную инфраструктуру,
- лебедки и спуско-подъемные устройства,
- программное обеспечение для планирования миссий и анализа данных.
Сравнение AUV и ROV
|
Параметр |
AUV (автономный подводный аппарат) |
ROV (телеуправляемый подводный аппарат) |
|
Связь |
Без постоянного кабеля, связь ограничена |
Постоянный кабель, связь с оператором в реальном времени |
|
Контроль |
Заранее заданная программа, высокая автономность |
Непрерывное управление оператором |
|
Основные задачи |
Съемка рельефа дна, мониторинг среды, поиск аномалий |
Инспекция, ремонт, точные манипуляции |
|
Длительность миссий |
Длительные автономные выходы, ограничены зарядом батарей |
Зависит от ресурсов носителя и условий работы |
|
Точность манипуляций |
Ниже, манипуляторы используются реже |
Высокая, возможны сложные операции |
Таблица помогает выбрать тип подводных роботов под конкретный проект: где-то важнее покрытие района, где-то — точная работа манипуляторов.
Учебные и исследовательские платформы
Учебные и исследовательские подводные аппараты — это компактные подводные роботы для университетов и лабораторий.
Они позволяют:
- изучать основы подводной робототехники,
- проверять новые алгоритмы управления и навигации,
- обкатывать прототипы датчиков и конструкций.
Часто такие системы становятся шагом от идеи на кафедре к промышленному проекту.
Перспективные разработки в подводной робототехнике
Перспективные разработки нацелены на рост автономности, улучшение экологических характеристик и интеграцию подводных роботов с цифровой инфраструктурой.
Среди направлений:
- создание автономных необитаемых подводных систем, способных месяцами работать в удаленных районах;
- развитие сетевых системы из нескольких аппаратов, выполняющих общую задачу;
- бионические решения для снижения шума и энергопотребления.
Технологии будущего в подводной робототехнике
Искусственный интеллект и автономный анализ данных
Искусственный интеллект меняет то, как применяются подводные роботы. Вместо «черного ящика», который просто пишет телеметрию, подводный робот может:
- распознавать объекты на видео и сонарных данных,
- выделять аномалии в потоке измерений,
- корректировать маршрут под текущую обстановку.
Такой подход снижает нагрузку на каналы связи: на берег передают уже отфильтрованные данные. Для задач, где использование связи ограничено, это критично.
Бионические конструкции (подражание морским животным)
Бионические подводные роботы имитируют движения рыб, скатов и других животных. Вместо винтов и рулей работают плавники и гибкие сегменты корпуса.
Преимущества:
- мягкое воздействие на водную среду,
- меньший шум,
- потенциал для повышения энергоэффективности.
Поэтому такие подводные аппараты особенно интересны для экологического мониторинга и наблюдений за живыми организмами.
Автономные подводные станции и сети устройств
Следующий шаг — распределенные сети устройств. Вместо одного подводного робота создается система из автономных станций и мобильных аппаратов, объединенных в общую платформу.
Такие системы позволяют:
- вести постоянный мониторинг больших акваторий,
- точнее отслеживать динамику процессов в морской среде,
- быстрее реагировать на аварии и природные аномалии.
По сути, это подводный вариант интернета вещей.
Преимущества и недостатки подводных роботов
Преимущества по сравнению с водолазами и традиционными методами
При грамотном внедрении подводные роботы дают заметные плюсы:
- опасные зоны обследуют аппараты, а не люди,
- доступны большие глубины,
- маршруты и процедуры легко повторить для мониторинга,
- один подводный робот можно переоснастить под разные задачи.
Такое применение подводных систем расширяет круг задач, которые раньше считались слишком рискованными или дорогими.
Ограничения: глубина, энергопотребление, стоимость, сложность обслуживания
Есть и минусы подводных роботов:
- высокая стоимость сложных систем и обслуживания,
- ограниченная автономность из-за батарей,
- сложность работы в узких пространствах и при сильных течениях,
- необходимость в подготовленной команде и инфраструктуре.
Поэтому перед внедрением подводной робототехники обычно оценивают, где подводные роботы действительно выгоднее классических методов, а где достаточно водолазного обследования или простых камер.
Итоги и перспективы развития
Как будет развиваться подводная робототехника в ближайшие годы?
Дальнейшее развитие подводной робототехники связано с:
- ростом автономности и «умности» систем,
- интеграцией подводных роботов с цифровыми платформами и аналитикой,
- снижением воздействия на морскую среду.
Подводные роботы будут чаще строиться на базе типовых платформ, которые проще адаптировать под конкретные отрасли.
Новые сценарии применения для науки и промышленности
По мере удешевления технологий и накопления опыта применения появляются новые сценарии:
- мониторинг прибрежной инфраструктуры и акваторий городов,
- контроль объектов аквакультуры,
- поддержка проектов по восстановлению морских экосистем,
- образовательные программы с учебными подводными аппаратами.
Компании и научные центры, которые уже сейчас внедряют подводных роботов, получают задел на будущее: лучше понимают состояние окружающей среды, точнее управляют подводной инфраструктурой и быстрее реагируют на изменения.