Все про роботов на гусеничном ходу: виды, особенности, применение
Гусеничные роботы — мощные и проходимые решения для сложных задач! Идеальны для транспортировки грузов, разведки и работы в экстремальных условиях. Надежность и эффективность в любом рельефе!

Обзор технологии
Гусеничный робот — это мобильная машина на гусеницах, которая выполняет задачи там, где колеса уже не справляются: на рыхлом грунте, в грязи, снегу, под завалами или на крутых склонах. За счет большой площади опоры он распределяет вес по поверхности и сохраняет устойчивость даже в сложном рельефе.
По сути, это гусеничная платформа с силовой установкой, системой сенсоров и модулем управления. На нее можно ставить манипуляторы, камеры, лидары, оборудование для пожаротушения или транспортировки грузов. Один и тот же вид робота за счет смены навесного оборудования решает разные задачи: от разведки и инспекции до демонтажа и работы в зонах ЧС.
Принципиальные отличия от колесных и шагающих систем
В сравнении с колесными системами гусеничное шасси:
- лучше «держит» мягкий грунт, снежную кашу, песок;
- устойчиво на уклонах и рыхлых насыпях;
- легче преодолевает бордюры, камни и раскисшую почву.
При этом классический гусеничный привод сложнее по конструкции и требует более внимательного обслуживания, чем колеса. Шагающие платформы обходят еще более сложные препятствия, но они дороже и пока менее надежны в массовой эксплуатации. Поэтому в реальных проектах часто выбирают гусеничную платформу как компромисс между проходимостью и стоимостью.
История развития гусеничных платформ
Первыми широко применять гусеничное шасси начали военные и строительные компании: танки, инженерные машины, бульдозеры. Со временем идеи перешли в робототехнику. Появились компактные гусеничные роботы для саперов, разведчиков и спасательных служб.
С развитием электроники и датчиков гусеничный робот стал привычным инструментом для инспекции промышленных объектов, работы в шахтах и карьерах, мониторинга опасных зон. Сегодня его рассматривают как мобильную платформу для установки любых модулей: от грузового отсека до сложных научных приборов.
Конструктивные особенности гусеничных роботов
Гусеничного робота отличает не только форма движителя, но и то, как распределены нагрузки, организовано управление и защита элементов.
Типы гусеничных механизмов
Резино-металлические гусеницы
Комбинируют металлический каркас и резиновый слой. Чаще всего используются на мобильных роботах для промышленности и гражданских задач: они тише, меньше повреждают покрытие и подходят для работы в помещениях.
Цельнометаллические гусеницы
Более тяжелые и шумные, но устойчивые к высоким температурам, искрам и абразивным материалам. Такой общий вид ходовой части характерен для тяжелой спецтехники и некоторых военных платформ.
Модульные пластиковые гусеницы
Легкие, относительно недорогие, подходят в качестве учебной и экспериментальной платформы. Чаще встречаются в образовательных наборах и прототипах.
Системы натяжения и амортизации
Чтобы гусеницы не слетали и не заклинивали, используется система натяжения: ролики, пружины, гидро- или пневмоцилиндры. От ее качества зависит ресурс гусеничного шасси и комфорт движения.
Амортизаторы и подпружиненные катки гасят вибрации, уменьшают удары по корпусу и полезной нагрузке, продлевают срок службы электроники. Для гусеничного робота, который постоянно ездит по камням и щебню, это критично.
Распределение нагрузки и работа гусеничного шасси
Гусеничное шасси распределяет массу по большой площади. За счет этого уменьшается давление на грунт, робот меньше проваливается в мягкую почву. Важно правильно разместить тяжелые узлы и батареи, чтобы центр тяжести не смещался слишком высоко или назад — иначе при подъеме или резком развороте платформа может заваливаться.
Основные виды гусеничных роботов
Гусеничные роботы различаются по массе, назначению и уровню автономности. Для удобства можно выделить несколько групп.
По размерам и грузоподъемности
Миниатюрные (до 10 кг)
Используются как учебный или исследовательский вид робота. Такие системы часто оснащают простыми манипуляторами и камерами, применяют для обучения, тестирования алгоритмов навигации и работы со сложным рельефом.
Средние (10–100 кг)
Сюда входят многие промышленные и инспекционные модели. Они перевозят инструменты, небольшие грузы, оборудование для измерений. Это делает мобильных роботов удобными для заводов, энергокомпаний и сервисных служб.
Тяжелые (100+ кг)
Грузовые платформы для транспортировки серьезных масс, работы с навесным инструментом и пожаротушения. Часто используются в качестве базы для сложных робототехнических комплексов.
По специализации
Транспортные
Перевозят оборудование, материалы и грузы по сложному рельефу. Могут работать в карьерных зонах, на промплощадках, под землей.
Манипуляционные
Оснащены роборукой, захватами или специализированным инструментом. Выполняют инспекцию, бурение, демонтаж, резку, вскрытие конструкций.
Исследовательские
Нагружены датчиками, камерами, лидарами. Работа гусеничного шасси в таких проектах подчинена задаче: обеспечить доступ к точке измерений в любых условиях.
Боевые
Создаются для разведки, огневой поддержки, доставки боеприпасов. Они имеют усиленную бронезащиту, защищенные каналы связи и иногда автономные функции сопровождения цели.
Ключевые преимущества гусеничных платформ
Проходимость и способность преодолевать препятствия
Гусеничные роботы уверенно преодолевают грязь, песок, снег, щебень. Они поднимаются на более крутые склоны, чем большинство колесных платформ, и не закапываются в рыхлых материалах.
Стабильность на неровных поверхностях
За счет длины опорной поверхности гусеничная платформа менее чувствительна к отдельным камням и ямам. Корпус меньше раскачивается, а полезная нагрузка получает меньше ударов.
Распределение веса и сцепление
Большая площадь контакта с поверхностью дает хорошее сцепление и снижает риск пробуксовки. Это особенно важно для роботов, которые тянут тяжелые прицепы или несут громоздкое оборудование.
Недостатки и ограничения
Сложность конструкции и обслуживания
Гусеничное шасси сложнее: больше деталей, подшипников, роликов. Требуется регулярная проверка натяжения, очистка от грязи и мелких камней. При неправильной эксплуатации возрастает риск износа и поломок.
Ограниченная скорость
Большинство гусеничных роботов движется медленнее колесных аналогов. Для задач, где главное — максимум километров в час, гусеничный вариант может быть избыточным.
Износ гусениц
Гусеницы со временем растягиваются, стираются, могут повреждаться острыми предметами. В условиях агрессивной среды важен запас прочности и продуманная схема обслуживания.
Энергопотребление
За счет большей площади контакта и трения гусеницы требуют больше энергии, чем колеса. Поэтому к выбору батареи и режимов работы относятся внимательнее, а применения учитывают возможные ограничения по автономности.
Военное и специальное применение
Разведывательные гусеничные роботы
Компактные платформы с камерами и тепловизорами обследуют территорию, тоннели, подземные коммуникации. Они передают изображение оператору и позволяют не рисковать людьми.
Саперные системы
Гусеничная платформа с манипулятором используется для подъема и обезвреживания подозрительных предметов. Устойчивость и точное управление критичны: оператор должен аккуратно подвести захват, не задевая препятствия.
Транспортные комплексы
Тяжелые платформы перевозят боеприпасы, инструмент, модули связи. Проходимость позволяет доставить груз туда, где обычная техника не проходит.
Боевые роботизированные комплексы
Военные применяют гусеничных роботов для огневой поддержки, сопровождения колонн и дистанционного наблюдения. В таких системах важны защищенность каналов управления и устойчивость к помехам.
Промышленное и аварийно-спасательное использование
Шахтные и инспекционные роботы
В шахтах и подземных выработках много узких проходов, грязи и воды. Здесь гусеничное шасси чувствует себя увереннее всего. Платформы с камерами и датчиками мониторинга обследуют выработки, контролируют состояние крепей и оборудования.
Строительные и демонтажные машины
Гусеничные роботы могут работать с гидромолотами, фрезами, фрезерными барабанами. Они разбирают конструкции, режут бетон и металл, выполняют тяжелую работу на безопасной дистанции от оператора.
Аварийно-спасательные комплексы
При пожарах, обрушениях или утечках опасных веществ гусеничные платформы заходят в зону, где человеку находиться нельзя. Они оценивают обстановку, измеряют температуру и газовый состав, помогают принимать решения о дальнейших действиях.
Научно-исследовательские и гражданские применения
Экстремальные экспедиции
В Арктике, Антарктике и горных районах гусеничное шасси помогает добраться до точек измерений по снегу, льду и камням. Платформа везет оборудование, образцы и автономные станции.
Подземные исследования и работы в ограниченных пространствах
Компактные гусеничные платформы обследуют тоннели, коллекторы, трубопроводы. Иногда они нужны как примерная схема будущего крупного комплекса: сначала тестируют решения на небольшой машине, а затем масштабируют.
Поисково-спасательные операции
Гусеницы уверенно движутся по завалам, строительному мусору и кирпичам. Роботы с камерами и микрофонами ищут людей под обломками, передают звук и изображение.
Сельскохозяйственные роботы и спецтехника
На влажных почвах и полях с мягким грунтом гусеничная платформа меньше топчет растения и не проваливается. Такие решения используют для точечного внесения удобрений, мониторинга и обработки посевов.
Технологическая начинка гусеничного робота
Плата управления и системы управления роботом
В центре электроники находится плата управления, на которой расположены процессор, интерфейсы связи и модули питания. В разных проектах ее дополняют дополнительные платы управления приводами, сенсорами, силовой частью.
Через эту электронику реализуется управление моторами, чтение данных с датчиков и обмен информацией с внешними системами. Именно она обеспечивает связь между оператором, программой автономного движения и гусеничной платформой.
Разработчики часто используют готовые контроллеры и платы, чтобы ускорить запуск проекта. В то же время сложные промышленные комплексы получают собственные платы, адаптированные под требования безопасности и специфику объекта.
Сенсоры, связь и интерфейсы управления
Гусеничные роботы комплектуются камерами, лидарами, датчиками наклона, температуры, газоанализаторами. Для связи применяют радиоканал, Wi-Fi, иногда оптоволоконный кабель.
Сигналы с пульта или от верхнего уровня системы поступают на контроллер, который преобразует их в команды для приводов. В ряде сценариев реализуют полуавтоматический режим: оператор задает цель, а управление движением по местности выполняет бортовой алгоритм.
Платформа как база для модулей
Гусеничная платформа выступает «носителем» полезной нагрузки. На нее устанавливают:
- манипуляторы и захваты;
- мачты с камерами и антеннами;
- грузовые модули, контейнеры, лафетные стволы;
- дополнительные батареи и компьютеры.
Один и тот же общий вид шасси может служить основой для разных комплексов — от шахтного инспектора до пожарного робота.
Обзор современных гусеничных роботов (ТОП-5 из каталога Robosobaka)
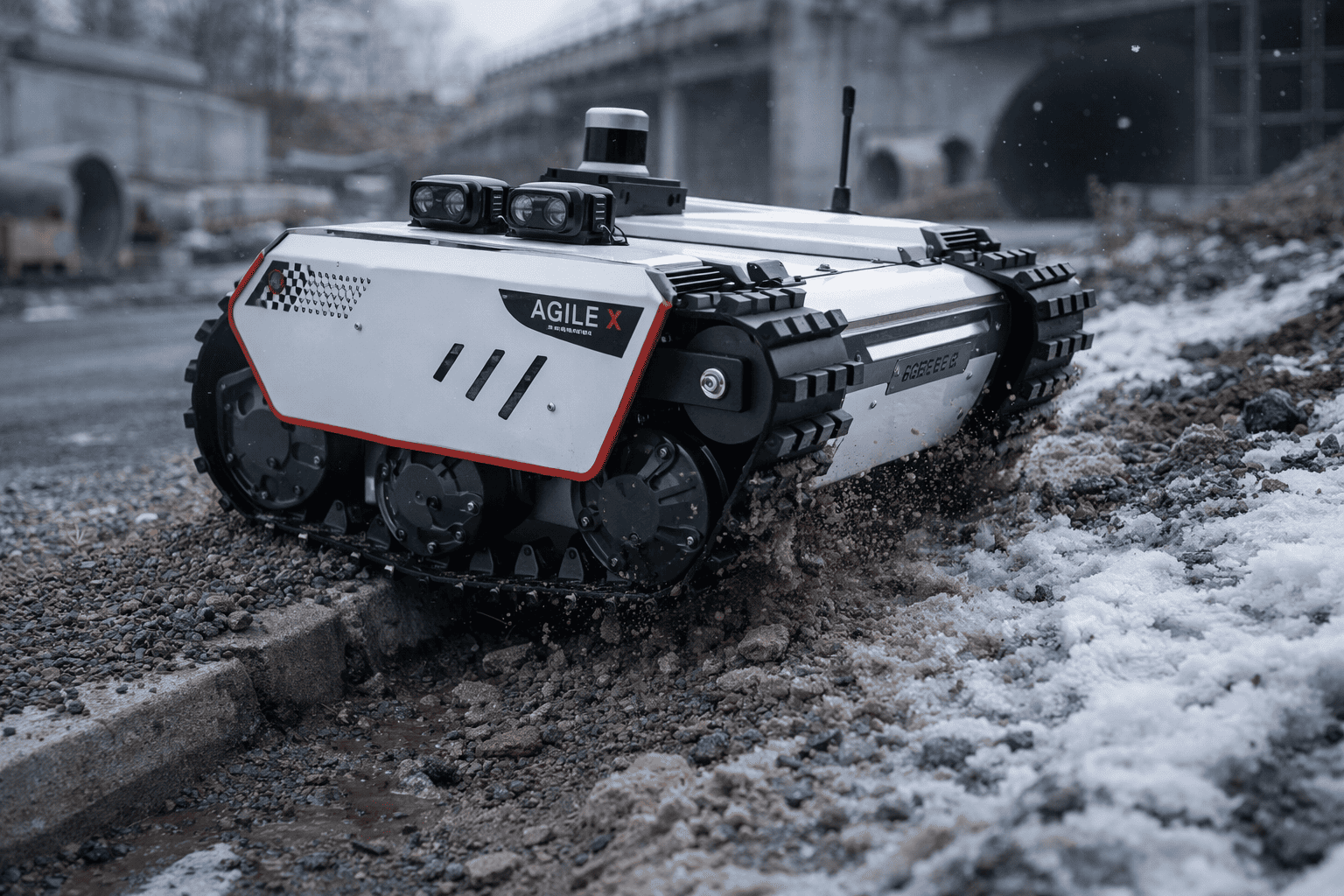
AgileX Bunker
AgileX Bunker — мощный грузовой робот на гусеничном шасси. Он весит около 145 кг, перевозит до 70 кг полезной нагрузки, развивает скорость до 5,4 км/ч и работает до 4 часов от батареи. Платформа рассчитана на работу по грязи, грунту и неровным поверхностям и подходит для логистики на промплощадках и в карьерах.
AgileX Bunker Mini
AgileX Bunker Mini — малогабаритный гусеничный робот для тесных пространств. При массе 56 кг он перевозит до 25 кг груза, передвигается со скоростью до 5,4 км/ч и преодолевает препятствия высотой до 11,5 см. Компактный корпус и степень защиты IP67 делают его удобным для тоннелей, труб и подземных коммуникаций.
AgileX Bunker Pro
AgileX Bunker Pro — тяжелая гусеничная платформа для сложных условий. Робот весит 180 кг, перевозит до 120 кг, выдерживает погружение в воду и работает при температуре от –20 до +60 °C. Гусеничное шасси с мощными моторами и независимой подвеской позволяет уверенно двигаться по бездорожью и крутым склонам.
Пожарный робот CITIC RXR-M40D
Робот CITIC RXR-M40D — огнеупорная гусеничная платформа для тушения пожаров и работы в зонах ЧС. Он оснащен лафетным стволом с несколькими режимами распыления воды, выдерживает сильное задымление и высокую температуру, управляется по защищенному радиоканалу на расстоянии до 1 км. Такого гусеничного робота используют пожарные подразделения и промышленные предприятия.
AgileX Bunker Mini в проекте «Северстали»
В кейсе компании Robosobaka гусеничный робот Bunker Mini строит карты и перевозит грузы на меткомбинате «Северстали». Платформа с лидаром сканирует территорию, создает 2D-карты и перевозит оборудование в труднодоступных зонах, где обычная техника не проедет. Этот пример показывает, как гусеничная платформа из каталога превращается в готовое решение под конкретный промышленный объект.
Сравнение гусеничных роботов с другими типами движителей
Чтобы наглядно показать отличия, сравним три подхода к мобильным платформам:
|
Тип движителя |
Проходимость |
Скорость |
Сложность обслуживания |
Типичные задачи |
|
Колеса |
Средняя, зависит от покрытия |
Высокая |
Низкая |
Склады, цехи, ровные площадки |
|
Гусеничное шасси |
Высокая, работает на мягком грунте и уклонах |
Средняя |
Средняя или высокая |
Шахты, бездорожье, зоны ЧС |
|
Шагающие системы |
Максимальная, обходят крупные препятствия |
Низкая |
Очень высокая |
Исследования, демонстрации, узкие спецзадачи |
В конкретном проекте выбор делается на примере реальных условий: если нужно быстро перемещаться по ровному полу, выгоднее колеса. Если критична проходимость и устойчивость, выигрывает гусеничная платформа. Если нужно шагать по лестницам и завалам, рассматривают бионические решения.
Итоги и перспективы технологии
Нишевое доминирование в экстремальных условиях
Гусеничный робот занимает устойчивую нишу там, где сочетание проходимости и устойчивости важнее максимальной скорости. Это шахты, карьеры, заводские площадки, зоны ЧС и объекты с высоким уровнем риска для людей.
Потенциал гражданского применения
По мере удешевления датчиков и электроники гусеничные платформы становятся доступнее для гражданских задач: обследование инфраструктуры, обслуживание трубопроводов, мониторинг сложных участков транспортных систем. Все больше компаний рассматривают применение таких решений как способ снизить риски и повысить безопасность.
Основные технологические вызовы и направления развития
Разработчики работают над увеличением ресурса гусеничного шасси, снижением массы и энергопотребления, совершенствованием систем управления и автономной навигации. В будущем гусеничного робота будут рассматривать как стандартный элемент цифровой инфраструктуры предприятия — такую же привычную платформу, как сегодня погрузчики или дроны.
 Предыдущая новость
Виды и применение роботов на колесном ходу
Предыдущая новость
Виды и применение роботов на колесном ходу
 Следующая новость
Как выбрать робособаку: рейтинг популярных моделей собак роботов
Следующая новость
Как выбрать робособаку: рейтинг популярных моделей собак роботов