Задача
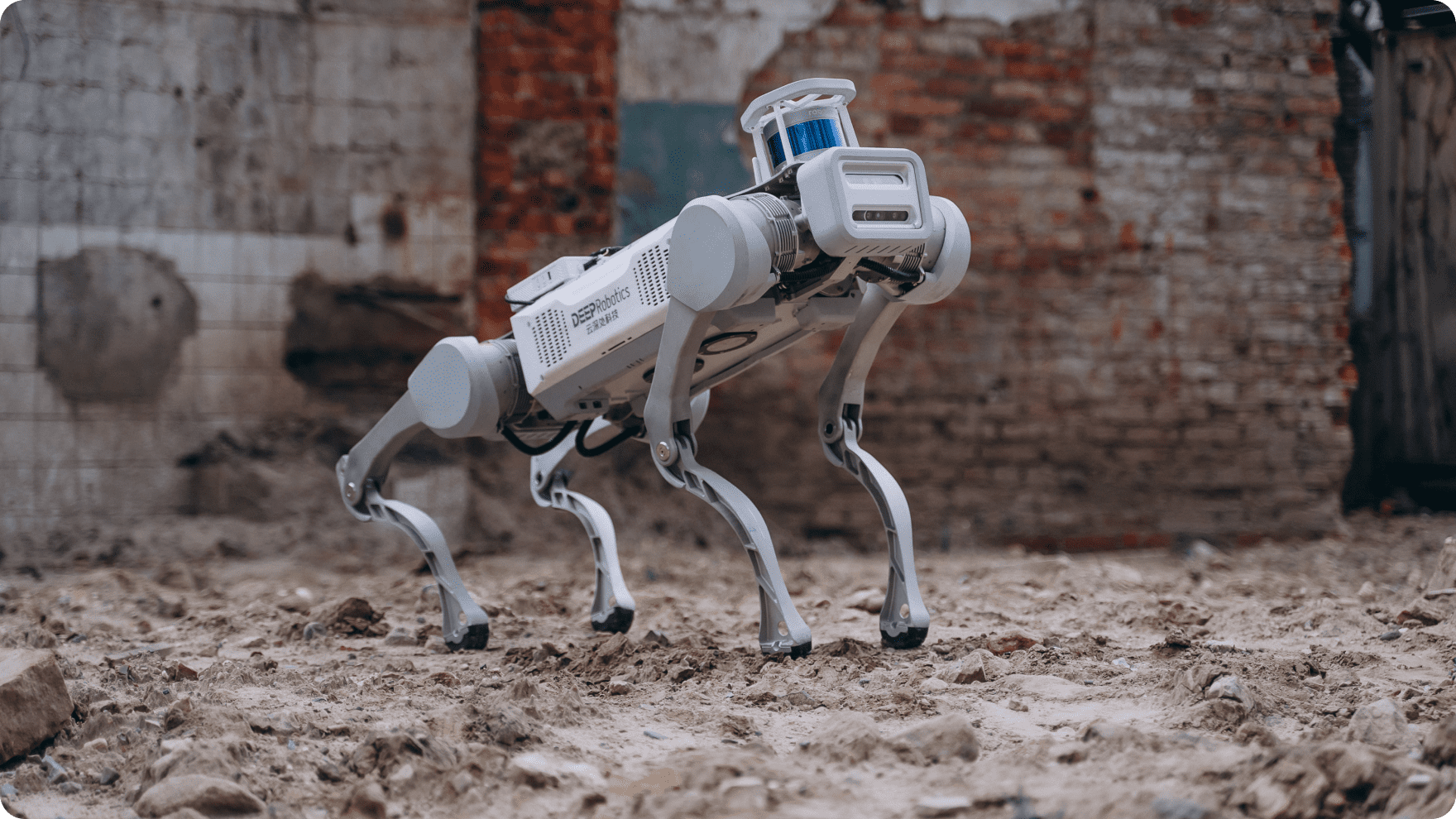
Состояние производственного оборудования отслеживает множество датчиков. На площадке с историей их сложно заменить на современные, и часто они находятся в труднодоступных местах. Именно поэтому мониторинг их показателей сопряжен с нарушением охраны труда. Выполнение этой задачи на производственной площадке передали робособаке.
Решение
Приборы на производственной площадке располагались высоко и в узких пространствах. Чтобы снимать показания с них, робособака была оборудована рукой-манипулятором и камерой. Робот обходит помещения по четко заданному маршруту, останавливается в заданных координатах и с помощью руки-манипулятора фиксирует показания. Если путь к прибору заблокирован, например, прегражден персоналом, то собака ждет заданное время, а потом переходит к следующему. При этом оператору приходит уведомление о пропуске того или иного датчика.
Привлечение роботов позволило исключить влияние человеческого фактора на рутинный мониторинг показателей оборудования, снизить риски производственных травм персонал и аварий на производстве.
 Unitree B2
Unitree B2
Размеры (стоя) :
≈ 1098 × 450 × 645 мм
Вес (с аккумулятором) :
60 кг
Максимальная скорость передвижения:
21.6 км/ч (6 м/с)
Грузоподъемность / Пиковая грузоподъемность:
до 120 кг
 DeepRobotics X30
DeepRobotics X30
Размеры (стоя) :
100 x 58.5 x 47 см
Вес (с аккумулятором) :
56 кг
Максимальная скорость передвижения:
≥ 14.4 км/ч
Грузоподъемность / Пиковая грузоподъемность:
85 кг
 Unitree Go2 EDU
Unitree Go2 EDU
Размеры (стоя) :
70 x 31 x 40 см
Вес (с аккумулятором) :
15 кг
Максимальная скорость передвижения:
13.3 км/ч
Грузоподъемность / Пиковая грузоподъемность:
8 кг / 12 кг