Коллаборативные роботы (коботы): технология совместной работы с человеком
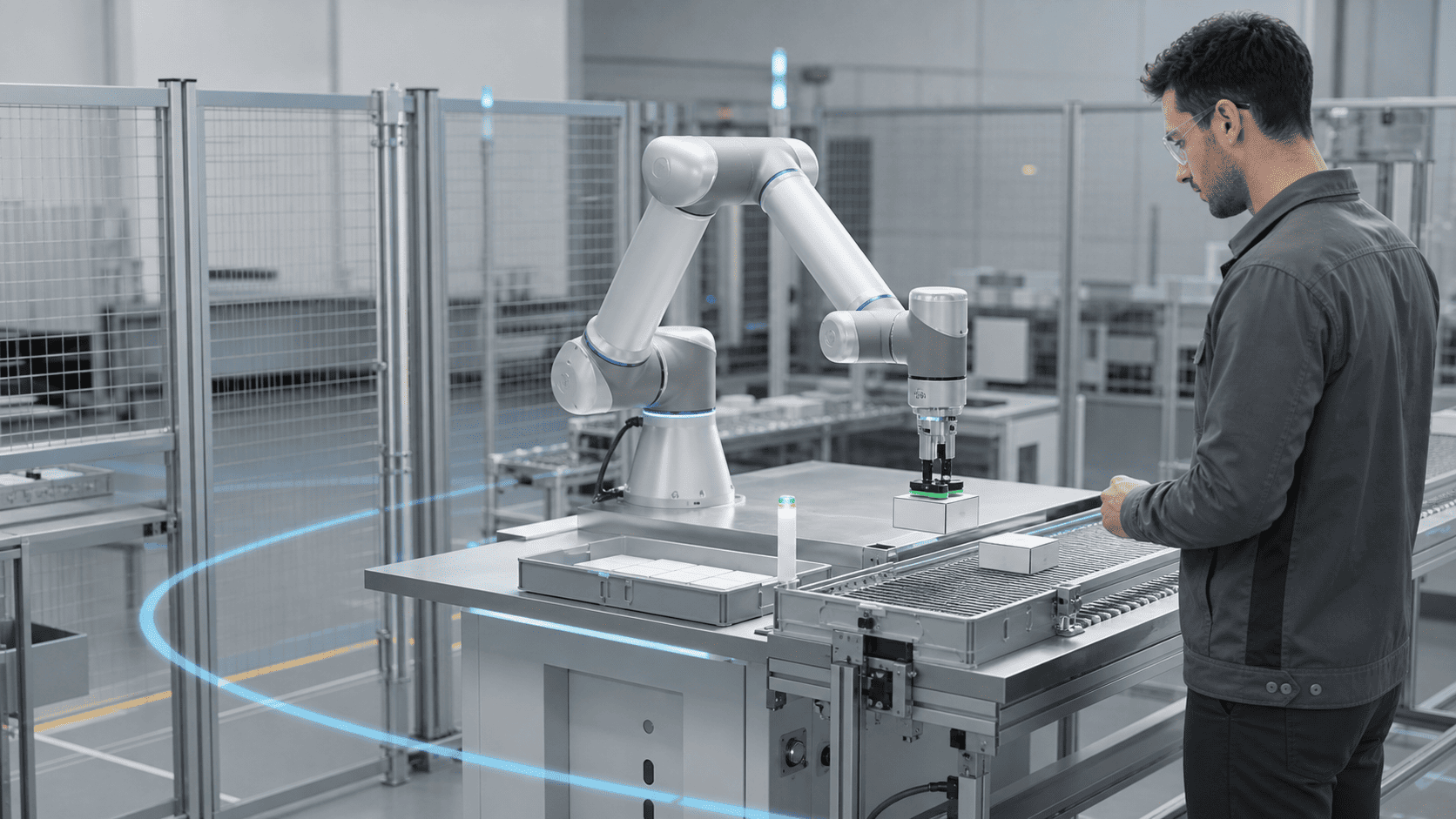
Коллаборативный робот — это манипулятор, который рассчитан на работу рядом с человеком и поддерживает безопасные режимы движения: ограничивает скорость и усилие, отслеживает контакт и корректно останавливается при риске. Чаще всего такие решения используют на сборке, упаковке, тестировании и контроле качества, где важны гибкость и быстрые переналадки.

Коллаборативный робот — это манипулятор, который рассчитан на работу рядом с человеком и поддерживает безопасные режимы движения: ограничивает скорость и усилие, отслеживает контакт и корректно останавливается при риске. Чаще всего такие решения используют на сборке, упаковке, тестировании и контроле качества, где важны гибкость и быстрые переналадки.
Робот-кобот помогает автоматизировать ручной участок без полной перестройки линии: оператор остается в процессе, а робот берет на себя повторяемую часть цикла. Поэтому коллаборативные роботы-коботы часто становятся первым шагом к роботизации для заводских площадок с переменным ассортиментом и небольшими партиями.
- Коботы дополняют классическую автоматизацию и закрывают операции рядом с оператором.
- Безопасность обеспечивается оценкой рисков, настройкой зон и встроенными ограничениями.
- При выборе важно начинать с процесса и инструмента, а не с красивых характеристик.
- Программирование часто проще: обучение траектории и визуальные сценарии ускоряют пилот.
- Экономический эффект зависит от загрузки поста, брака и простоев, а не от обещаний окупаемости.
- Для высокоскоростных и тяжелых задач чаще подходят традиционные промышленные роботы.
Что такое коллаборативный робот и как он работает?
Кобот — это робот для совместной работы с человеком в одном рабочем пространстве. Его задача не заменить человека целиком, а сделать участок предсказуемым: робот перемещает детали, удерживает инструмент, повторяет траекторию и не устает на длинных сменах, а оператор контролирует качество, подачу и переналадку.
Если говорить простыми словами, кобот действует как аккуратная механическая «рука». Движение рассчитывает контроллер — устройство управления, которое задает траекторию, следит за параметрами и обеспечивает остановку при нестандартной ситуации. Важно, что безопасность в коботах строится на сочетании датчиков и корректно настроенных режимов.
Ключевые отличия коботов от традиционных промышленных роботов
Коботы полезны там, где продукт меняется часто, а инфраструктуру ограждений ставить сложно или экономически невыгодно. Но у них есть и ограничения: ради безопасности скорость и мощность обычно ниже, чем у классических решений. Поэтому выбор зависит от задачи, потока и требований к безопасности рабочего места.
|
Критерий |
Промышленный робот |
Коллаборативный робот |
|
Работа рядом с человеком |
Обычно требуется ограждение и разделение зон |
Возможна совместная работа при настройке режимов и оценке рисков |
|
Скорость и мощность |
Выше, подходит для «жестких» циклов |
Чаще ограничены для предотвращения травм |
|
Переналадка |
Возможна, но нередко сложнее |
Часто быстрее благодаря простому программированию |
|
Инфраструктура |
Больше требований к ограждениям и безопасности |
Чаще компактнее, но правила безопасности обязательны |
|
Типовые задачи |
Сварка, покраска, тяжелые операции |
Сборка, упаковка, тесты, контроль качества |
Как устроен кобот: компоненты и технологии
Коллаборативный робот-манипулятор включает сам манипулятор, контроллер и систему датчиков. Часто применяются датчики силы и момента — это сенсоры, которые помогают распознавать контакт и контролировать усилие. Встроенное ПО задает ограничения скорости, мощности, зоны движения и поведение при остановке.
Практически это выглядит так: робот выполняет траекторию, но при превышении заданных порогов он замедляется или останавливается. Это повышает безопасность, однако не отменяет необходимости проектировать рабочее место — инструмент, оснастку, подачу деталей и сценарии взаимодействия с оператором.
Принципы безопасности коллаборативных роботов
Безопасность коботов обычно описывают через стандарты ISO и документ ISO/TS 15066. Если объяснить по-человечески, это подход к совместной работе, где сначала оценивают риски конкретного поста, а затем настраивают безопасные режимы: ограничение скорости, контроль усилия, зоны и остановки.
На практике ключевое — не наличие кобота, а правильная организация участка. Нужно описать процесс, определить точки, где человек приближается к роботу, выбрать инструмент и зафиксировать правила эксплуатации. Изменения программы и оснастки должны проходить контроль, иначе безопасный пост быстро становится небезопасным.
Системы безопасности для предотвращения травм
Система безопасности кобота обычно многоуровневая. Внутри робота работают программные и аппаратные ограничения, а на участке могут быть дополнительные средства защиты. Главная цель — предотвратить травму, если человек оказался в зоне движения или произошел контакт.
Типовые меры:
- ограничение силы и мощности движения,
- контроль скорости в разных режимах и зонах,
- стоп-функции и корректная остановка при контакте,
- аварийная остановка и блокировки для обслуживания,
- внешние датчики зоны при необходимости (сканеры, барьеры).
Виды коллаборативных роботов
Виды коллаборативных роботов помогают подобрать решение под процесс и место установки. По конструкции чаще встречаются шарнирные коботы как универсальные «руки», а также компактные варианты для настольных операций. В отдельных задачах применяются SCARA-решения, если нужна высокая скорость работы в плоскости, но выбор всегда зависит от реальной траектории и инструмента.
Важно заранее определить, что именно должен делать робот: удерживать деталь, подводить инструмент, дозировать, укладывать или обслуживать оператора. От этого зависит не только конструкция, но и требования к безопасности, оснастке и программированию.
Как выбрать подходящего кобота-манипулятора для ваших задач
Выбор начинается с описания операции: входные детали, ориентация, инструмент, контроль качества, взаимодействие с человеком. Затем оценивают рабочую зону и ограничения по среде. Кобота-манипулятора нужно подбирать вместе с инструментом и подачей — иначе в реальной ячейке окажется, что робот «дотягивается», но неудобно и небезопасно.
Шаги выбора:
- описать цикл: что делает оператор, что выполняет робот, где точки передачи;
- проверить рабочую зону и траекторию без опасных «переломов» и близких проходов;
- подобрать инструмент и крепление, учесть кабели, шланги и требования к чистоте;
- определить режимы безопасности: зоны, скорости, поведение при остановке;
- запланировать интеграцию с оборудованием: датчики, конвейер, интерфейсы;
- провести пилот и закрепить регламент изменений программы.
Типичные ошибки:
- считать, что кобот по умолчанию безопасен без оценки рисков,
- игнорировать инструмент и оснастку при выборе модели,
- не фиксировать изменения программ и настроек после запуска.
Для первичного сравнения решений удобно использовать каталог коботов — а затем уточнять требования к интеграции и рабочим органам уже под конкретный процесс.
Сферы применения коллаборативных роботов
Применение коллаборативных роботов охватывает участки, где нужна повторяемость и участие человека: сборка, упаковка, тестирование, маркировка, контроль качества. В промышленности коботов часто ставят туда, где классический робот потребовал бы серьезной инфраструктуры, а ручной труд уже не обеспечивает стабильность и темп.
Примеры направлений:
- сборка и монтаж узлов,
- контроль качества и тестирование,
- упаковка, сортировка, маркировка,
- обслуживание станков и рабочих мест оператора,
- лабораторные процессы и контролируемые зоны.
Логистика и складская автоматизация
В логистике коботов применяют в упаковке и комплектации: взять, уложить, промаркировать, подготовить к отгрузке. Часто кобот работает рядом с оператором, который формирует заказ, а робот выполняет повторяемую часть цикла и снижает количество пропусков.
Если задача связана со складом, полезно заранее сопоставить участок с общей стратегией автоматизации и посмотреть смежные решения в разделе «Складская робототехника».
Лабораторные и медицинские исследования
Коботы востребованы в лабораториях, где много повторяемых действий: перенос контейнеров, подготовка проб, работа с дозированием и маркировкой. Отдельные сценарии встречаются в медицине как часть лабораторных и исследовательских процессов — речь о стабильных технологических операциях в контролируемой среде.
Для ориентиров по мобильным решениям, которые могут сочетать перемещение и работу манипулятора в учебных и R&D-сценариях, иногда рассматривают AgileX LIMO COBOT — при условии, что требования безопасности и зона работы описаны так же строго, как и для стационарного поста.
Что делают коллаборативные роботы: реальные кейсы внедрения
Чтобы быстро оценить ценность коботов, удобны мини-кейсы «задача → внедрение → эффект». Ниже — типовые примеры, которые можно адаптировать под ваш процесс.
Примеры:
- сборка узла: робот удерживает деталь и повторяет операцию — снижается количество ошибок и повышается повторяемость;
- упаковка: робот укладывает изделия по шаблону — упрощается контроль и уменьшаются простои из-за сбоя ритма;
- тестирование: робот подает изделие к стенду и фиксирует положение — повышается стабильность проверки;
- маркировка: робот наносит метку и подтверждает считывание — сокращаются пропуски и ручные исправления.
Безопасность при работе с коллаборативными роботами
Безопасность — это не разовая настройка, а постоянный процесс: обучение, аудит, контроль изменений и дисциплина рабочих мест. Даже небольшой перенос поста или смена инструмента меняют риски, поэтому нужны процедуры: кто имеет право менять программу, как проверяется пост перед сменой, где хранится журнал изменений.
Практические правила для заводской площадки:
- проводить оценку рисков при каждом изменении инструмента или процесса;
- фиксировать зоны и режимы, не «подкручивать» скорость без проверки;
- обучать операторов и назначать ответственных за изменения программ;
- проверять аварийные остановы и порядок запуска после остановки;
- поддерживать порядок и исключать непредсказуемые препятствия в зоне движения.
Экономическая эффективность коботов
Экономика кобота складывается из стоимости оборудования, инструмента, интеграции, обучения и обслуживания. Эффект проявляется через стабильность процесса: меньше ошибок, меньше потерь времени на переделки, выше предсказуемость качества, проще масштабировать решение на похожие посты.
Оценивать эффективность корректнее по методике «процесс до/после»: измерить длительность операции, долю ручного времени, причины брака, простои и требования к качеству. Так компания получает реалистичную картину, а не ожидания от усредненных кейсов.
|
Статья затрат |
Что включает? |
Как влияет на результат? |
|
Оборудование |
Кобот, инструмент, крепления |
Определяет возможности процесса и ограничения |
|
Интеграция |
Датчики, безопасность, интерфейсы |
Влияет на стабильность и повторяемость |
|
Обучение |
Обучение операторов и инженеров |
Ускоряет запуск и снижает риск ошибок |
|
Обслуживание |
Регламенты, поддержка, запасные части |
Снижает простои и риски остановки |
Преимущества и ограничения коботов
У коботов есть сильные стороны, но важно учитывать ограничения заранее. Тогда выбор будет осознанным: где кобот закрывает задачу быстро, а где лучше сразу рассмотреть классического промышленного робота с ограждением.
|
Преимущества |
Ограничения |
|
Быстрый пилот и удобная переналадка |
Скорость и мощность часто ограничены безопасностью |
|
Совместная работа с оператором при правильной настройке |
Не все процессы допускают работу без разделения зон |
|
Компактный пост и меньше инфраструктуры |
Оценка рисков и аудит рабочего места обязательны |
|
Стабильность повторяемых операций |
Для тяжелых и опасных операций чаще нужен классический робот |
Как программировать коллаборативного робота?
Программирование кобота обычно строится на простых сценариях: обучение траектории «вручную», визуальные интерфейсы и шаблоны операций. Это удобно для пилотов и малосерийных процессов, где программу приходится менять часто. При этом важно выстроить управление роботом как процесс: хранить версии программ, иметь тестовый режим и фиксировать изменения.
Мини-гайд запуска программы:
- Описать цикл и точки взаимодействия человека и робота.
- Подобрать инструмент и проверить крепление и кабель-менеджмент.
- Настроить ограничения скорости и усилия для каждого этапа движения.
- Обучить траекторию и проверить ее в тестовом режиме без нагрузки.
- Добавить проверки и обработку ошибок для нестандартных ситуаций.
- Провести пробный запуск и закрепить регламент изменений.
Будущее коллаборативной робототехники
Тренды понятны: больше сенсоров, проще программирование, глубже интеграция с цифровыми системами предприятия. Растет интерес к связке «кобот + мобильная платформа», когда один манипулятор может обслуживать несколько зон. Также усиливается фокус на диагностике и предиктивном обслуживании, чтобы уменьшать простои.
Интеграция с машинным зрением и искусственным интеллектом
Машинное зрение помогает распознавать объекты, определять их положение и контролировать качество. Искусственный интеллект в прикладном смысле улучшает распознавание и устойчивость к вариативности деталей, но не отменяет инженерной настройки и требований безопасности. Для погружения в тему и выбора компонентов удобно смотреть профильные материалы в разделе «Машинное зрение для роботов».
Рост применения коботов в малом и среднем бизнесе
Малые и средние предприятия чаще выбирают коботов из-за гибкости и возможности начать с одного рабочего места. Пилот проще организовать, а затем переносить практику на похожие операции. Здесь особенно важны обучение и сервис: если персонал не понимает правила эксплуатации, пост быстро теряет эффективность.
Заключение: с чего начать внедрение коллаборативного робота
Начните с процесса, где много повторов и есть участие оператора: упаковка, сборка, тестирование или маркировка. Затем проведите оценку рисков, выберите инструмент и зафиксируйте режимы безопасности. После пилота закрепите регламенты — кто меняет программу, как проверяется пост, как проводится аудит изменений. Такой подход делает внедрение предсказуемым и снижает риск «поставили, но не используем».
Чек-лист готовности:
- Описан процесс и ожидаемый результат в терминах качества и стабильности.
- Определены зоны взаимодействия человека и робота и правила безопасности.
- Подобран инструмент и продумана подача деталей.
- Спланирована интеграция с оборудованием и контроль качества.
- Назначены ответственные за обучение, изменения программ и обслуживание.
FAQ
Что такое коллаборативный робот (кобот)?
Это робот, рассчитанный на совместную работу с человеком при правильно настроенных режимах безопасности, ограничениях скорости и усилия и выполненной оценке рисков.
Чем коллаборативные роботы отличаются от промышленных роботов?
Коботы ориентированы на гибкость и совместную работу, а классических промышленных роботов чаще используют для высокоскоростных и тяжелых процессов с ограждениями и разделением зон.
Где применяются коллаборативные роботы?
В сборке, упаковке, тестировании, контроле качества, логистике и лабораторных процессах — там, где нужны повторяемость и участие оператора.
Каковы основные преимущества использования коботов?
Более гибкая автоматизация, удобная переналадка, стабильность повторяемых операций и возможность безопасного взаимодействия при соблюдении правил.
Как выбрать подходящего коллаборативного робота для производства?
Начните с процесса и инструмента, затем оцените рабочую зону, среду, безопасность и интеграцию, проведите пилот и закрепите регламенты эксплуатации и контроля изменений.
 Предыдущая новость
Как работают роботы-грузчики для склада: перемещение и подъем грузов (copy)
Предыдущая новость
Как работают роботы-грузчики для склада: перемещение и подъем грузов (copy)
 Следующая новость
Антропоморфные роботы: полный обзор по человекоподобным машинам будущего
Следующая новость
Антропоморфные роботы: полный обзор по человекоподобным машинам будущего